 Matthew W. Nice, PhD
Matthew W. Nice, PhD
About
As of Fall 2024 I’m a Research Faculty at the Virginia Tech Transportation Institute. My previous research posts include being a Research Engineer at the Institute for Software Integrated Systems, at Vanderbilt University. My Ph.D. work was advised by Prof. Dan Work, Civil Engineering and Prof. Jonathan Sprinkle, Computer Science. I completed my B.S.E. in Biomedical Engineering at Tulane University, where I worked in the Microvascular Dynamics Lab with Prof. W.L. Murfee during my undergraduate studies.
My research is focused on fielding novel technologies like connectivity and automation in cars, connectivity technology for vulnerable road users, and integrations with smart infrastructure. We are still in the early stages of considering mobility in a transportation cyber-physical system. Integrating computing, robotics, and automation in transportation systems could revolutionize the safety and efficiency of mobility at a societal scale.
Email / Google Scholar / YouTube / LinkedIn / Github
Featured Videos
Enabling Mixed Autonomy Traffic Control
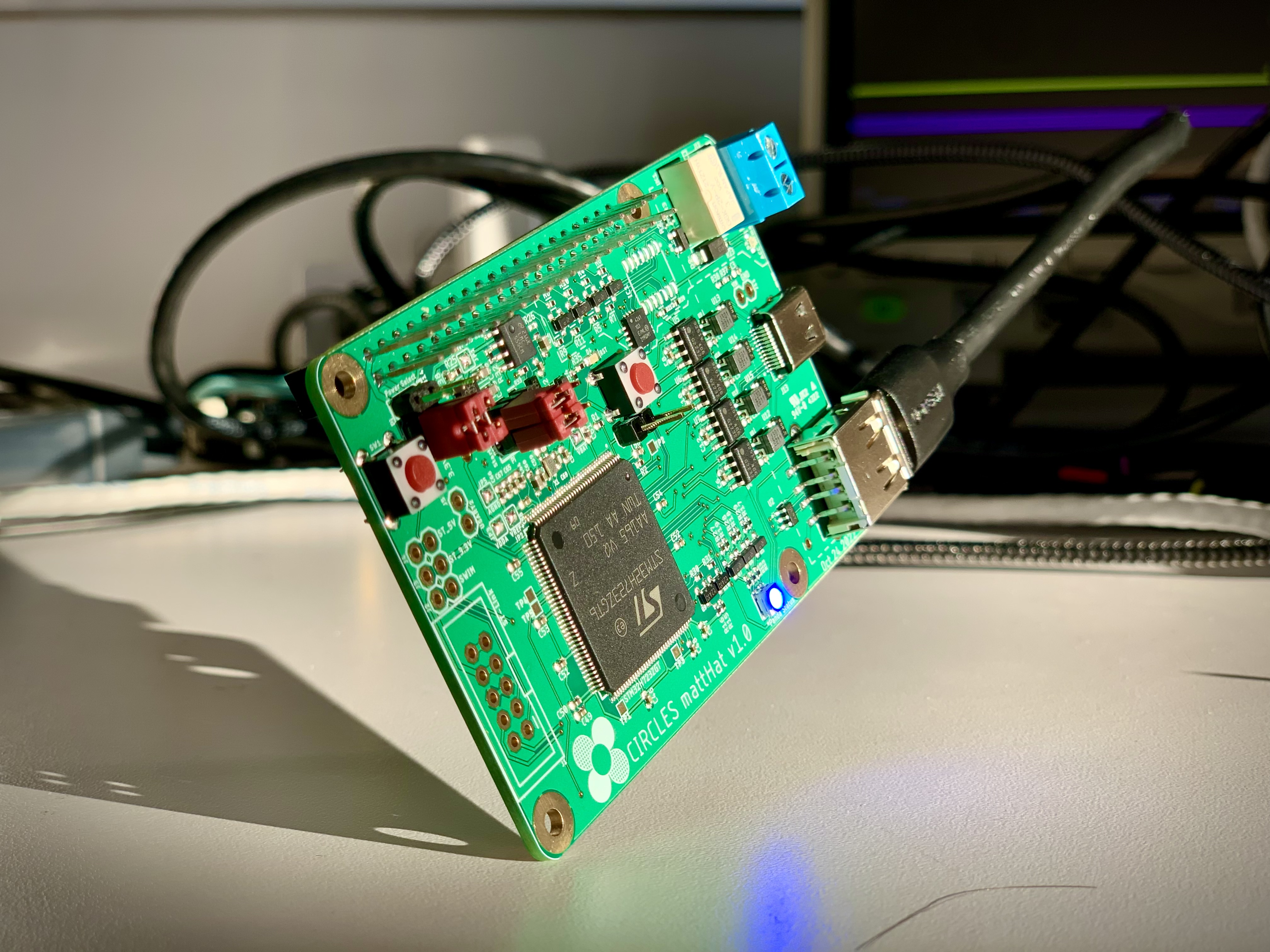
This research demonstrates a new capability of automated vehicles: mixed autonomy traffic control, which has the promise to improve safety, efficiency, and energy outcomes in transportation systems at a societal scale. This research introduces an extensible open-source hardware and software platform, and its implementation at a scale of 100 vehicles. You can also watch on Youtube.
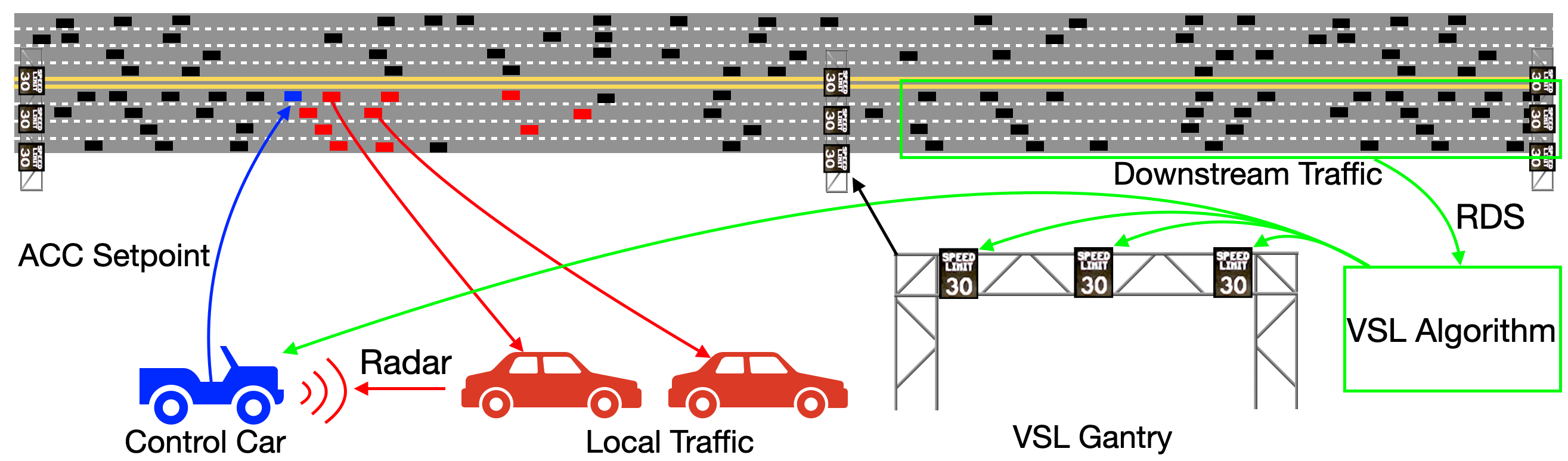
SAILing CAVs: Speed-Adaptive Infrastructure-Linked Connected & Automated Vehicles
This research introduces a new V2X application in Connected and Automated Vehicles: SAILing CAVs. We create a vehicle which can automatically match the infrastructure-based variable speed limits as they dynamically change on the interstate. You can also watch on Youtube.
Selected Grants, Fellowships, Awards, and Honors
Best Paper Award, International Conference on Cyber-Physical Systems, ACM/IEEE ICCPS 2025
The best paper from the premier single-track conference in cyber-physical systems. “Can control barrier functions keep automated vehicles safe in live freeway traffic?”, Gunter et al., 2025
Outstanding Paper Award, Institute for Software Integrated Systems, TRB AM 2025
“Stop-and-go waves reconstruction via iterative refinement”, Ji et al., 2025
Best Paper Award, Travel Time Speed and Reliability (TTSR) Subcommittee, TRB AM 2025
“Assessing an AI-based Variable Speed Limit System on Proactive Slowdown Warnings with Ultra-High Fidelity Speed Data”, Zhang et al., 2025
ITS Lead Institution Award, IEEE ITSC 2024
This award recognizes the achievements of the CIRCLES Consortium, of which I led the hardware/software research, development, and integration. It is for those who have made significant and outstanding contributions to the research and applications of ITS related technologies. This award was established to recognize, promote, stimulate and publicize major research contributions and outstanding achievement in ITS related fields.
Dwight D. Eisenhower Transportation Fellowship Research Showcase, FHWA, USDOT 2024
One of 5 Fellows of 200+ selected to showcase their work at the DDETFP Research Showcase.
Dwight D. Eisenhower Transportation Fellowship, FHWA, USDOT 2021, 2022, 2023
Three-time award recipient. Awarded to the nation’s brightest minds in the field of transportation to help retain top talent in the U.S. transportation industry.
Peter G. Hoadley Fellowship Award, Vanderbilt University 2023
Endowed award for outstanding PhD scholarship.
Senior Honors Scholar, Tulane University 2018
1 of 25 Graduates.
Biomedical Engineering Senior Scholar Award, Tulane University 2018
For Outstanding Thesis.
Tulane Scholar, Tulane University 2018
Top 4% of Class.
Selected Publications (*: equal contribution)
A Middle Way to Traffic Enlightenment
Proceedings of the ACM/IEEE 15th International Conference on Cyber-Physical Systems (ICCPS)

So you think you can track?
Winter Conference on the Application of Computer Vision 2024 (WACV)
SAILing CAVs: Speed-Adaptive Infrastructure-Linked Connected and Automated Vehicles

Deploying traffic smoothing cruise controllers learned from trajectory data
2022 International Conference on Robotics and Automation (ICRA)

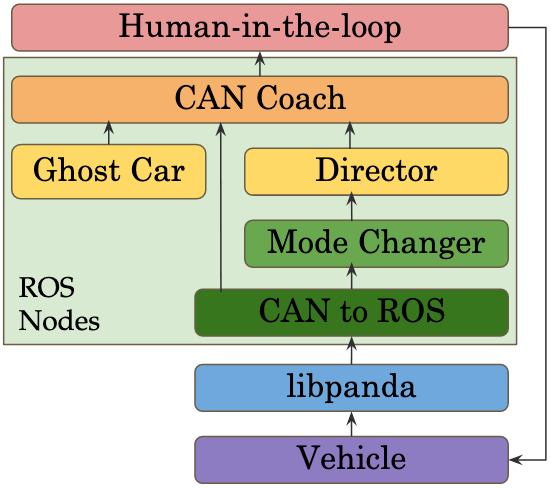
CAN coach: Vehicular control through human cyber-physical systems
Proceedings of the ACM/IEEE 12th International Conference on Cyber-Physical Systems (ICCPS)
Mentoring & Academic Service
Mentor for Independent Research (2019 - Present)
Vanderbilt University, Research Experience for Undergraduates (REU)
- Gracie Gumm, Undergraduate in Civil Engineering, now PhD Student at UT-Austin
- Maya Kumar, Undergraduate in Computer Science
- Kelsey Rainey, Undergraduate in Electrical Engineering, from Tennessee Tech
- Evan Chow, Undergraduate in Mechanical Engineering
- Alex Spero, Undergraduate in Computer Science
- Sally Kim, Undergraduate in Computer Science
- Aspen Bailey, Undergraduate in Computer Science, from Fisk University
Academic Service
Reviewer for ICRA 2023, Technical Program Committee DI-CPS 2022
Open Source Software
I have authored or co-authored projects on Github, including these selected public repositories:
strym: A python package for real-time CAN data logging, analysis and visualization.
can_to_ros: A ROS package that decodes, publishes, and records vehicle network (CAN, CAN FD, etc.) messages in real time. Also used to inject control commands to vehicles. Uses model-based code generation to dynamically be modified/updated via VIN, currently tested with 4 different OEMs.
libpanda: A C++ library that handles communication with microprocessors/vehicles. My contributions focus on applications (automated software updates, health monitors, etc.)